Na een tijdje stilte weer wat verder gewerkt aan de traction control...
In principe zou de hardware nu moeten werken, al moeten er nog wat weerstanden vervangen worden en moet overal het aansluitmateriaal voor kabels nog aan.
Aan de life support om te testen:
De injector pulsdetectie en de mogelijkheid pulsen te blokkeren hadden we eerder al af. Nu hebben we de frequentiedetectie van de ABS sensors gedaan. Zowel passieve sensoren (2-wire, zoals die van de SW20) als actieve sensoren (3-wire, zoals op veel moderne auto's) kunnen worden uitgelezen.
Om te testen hangen we de inputs aan de headphone-uitgang van de geluidskaart in de PC. Met een programma (tone generator) kunnen we dan verschillende frequenties genereren en checken of we ze kunnen uitlezen. Da's dan wel stereo dus we kunnen 2 kanalen tegelijk testen. Test firmware die de gelezen waardes via de seriele kabel weergeeft:
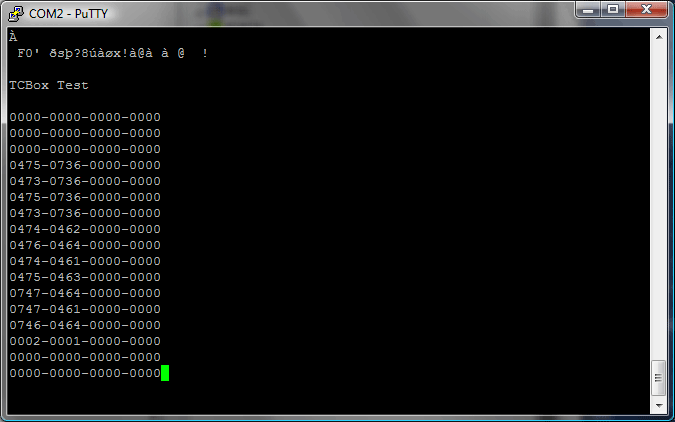
De ABS sensor detectie is bij een bereik van 0-250 km/h tot een halve km/h nauwkeurig. Waarschijnlijk maken we het bereik nog wat groter ten koste van de resolutie, want meer dan 1 km/h nauwkeurig is eigenlijk overbodig.
Het is de bedoeling dat deze week een uitgebreidere test firmware klaar is die zowel het uitlezen van de ABS sensoren als het detecteren van de injectorpulsen (en daarmee het toerental) ondersteunt. Komend weekend willen we dat dan gaan testen op m'n tweetje

Als dat werkt is de volgende stap het onderbreken van injectorpulsen (bijv. door een testfirmware die een revlimiter op 2500 rpm ofzo vormt). Werkt dat ook dan is de hardware in principe OK en kunnen we een PCB gaan verzinnen en laten maken, terwijl we op het gemak de "echte" firmware proggen met de anti-slip algoritmes. Verdere veranderingen zijn dan alleen in software nodig.
Enkele specs/features van wat de firmware straks moet kunnen:
- Tot 4 injectors kunnen detecteren en blokkeren (tot 6 injectors is met de microcontroller mogelijk, waarschijnlijk is dat iets voor versie 2).
- 25 keer per seconde de ABS sensoren uitlezen en indien nodig het motorvermogen bijregelen via injector-cut.
- Instelbare soft en hard revlimiters.
- Verschillende niveau's van injector-cut, instelbaar voor verschillende wielspin-percentages. We weten nog niet of die injector-cut patronen mappable worden of dat ze on the fly uitgerekend worden door de box (de eeprom-ruimte om maps/configuratie in op te slaan is beperkt en de controller is snel zat om het zelf te berekenen).
- Instelbaar maximum toegelaten wielspin-percentage. Je kunt dus bijvoorbeeld 20% wielspin toestaan en plankgas de bocht door waarbij de box zorgt dat je (aangedreven) achterwielen niet meer dan 20% sneller dan je voorwielen draaien, dus een milde, gecontroleerde drift als het ware. Op nat kan je bv slechts 5% of helemaal geen wielspin (zoals af-fabriek systemen dat doen) toestaan.
- Windows software om de box via een seriele kabel te configureren en calibreren, en live-data weer te geven en te loggen (de wielsnelheden, voertuigsnelheid, wielspin-percentage, en rpm).
Behalve 6 cilinder support staat er nog een feature op de planning voor versie 2. We hebben nog 3 analoog->digitaal channels en een PWM output over. Met 1 ADC channel kunnen we een turbodruksensor uitlezen, en met het PWM kanaal kunnen we een servoklep zoals bijvoorbeeld een boost solenoid aansturen. Dus zoals je waarschijnlijk al hebt geraden, is het plan om er ook een elektronische boost controller in te bouwen

Die kunnen we dan natuurlijk weer koppelen aan de traction control functie, zodat je kunt kiezen of er injector pulsen moeten worden overgeslagen als er wielspin is, of de turbodruk kortstondig beperkt moet worden, of beide.
De andere ADC channels zouden we theoretisch kunnen gebruiken om nog twee andere dingen te dataloggen, zoals bv koelvloeistoftemperatuur - dan zouden we de revlimiter en boost control ook kunnen koppelen aan de koelwatertemperatuur om de rpm en boost laag te houden als de motor nog koud is. Mogelijkheden zat dus!







{kind=link}